

目录:
- 前言
- 1、下载雷达仿真包
- 2、添加雷达支架描述文件
- 3、添加雷达描述文件
- 4、启动仿真
- 5、添加IMU模块
- 6、添加RGB-D相机
- 7、LIO-SAM仿真
- 安装依赖
- 安装GTSAM
- 编译LIO-SAM
- 运行
- 8、源码
- 遇到的问题
- 1、error: ‘class std::unordered_map’ has no member named ‘serialize’
- 2、gazebo中机器人静止,rviz中反复横跳
- 3、运行时报错 [lio_sam_mapOptmization-5] process has died [pid 260348, exit code -11
- 4、运行时报错 error while loading shared libraries: [libmetis-gtsam.so](https://link.zhihu.com/?target=http%3A//libmetis-gtsam.so/): cannot open shared object file: No such file or directory
- 5、运行时报 Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame
前言
最近想搭建一个机器人移动平台,但是设备还没完全到齐,在设备全部到齐之前,我们先在gazebo中做一个仿真,进行相关的算法和功能包的部署。在这个仿真中机器人在一个移动底盘上搭载了16线激光雷达、IMU、RGB-D相机,并在最后跑了一个LIO-SAM,建图效果还不错。整个过程遇到了一些问题,都一一解决了,对主要的问题做了一些记录,有其他问题的可以在讨论区回复。另外,本工程的源码放在在GitHub上,欢迎大家下载学习。
1、下载雷达仿真包
首先下载VLP的激光雷达的仿真开发包到自己的工作空间中
git clone https://bitbucket.org/DataspeedInc/velodyne_simulator/src/master/
下载之后 /src 的文件结构如下
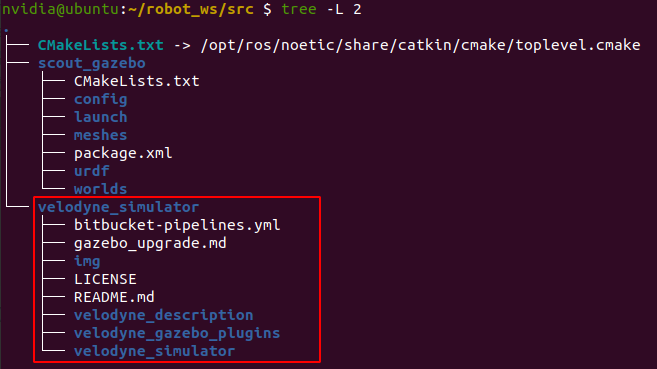
下载好激光雷达的仿真包之后重新catkin_make一次,主要是为了生成激光雷达的点云产生库文件,不然后面仿真的时候会没有点云相关话题。编译一次之后就会在我们工作空间的的devel/lib文件夹下生成两个动态链接库如下:
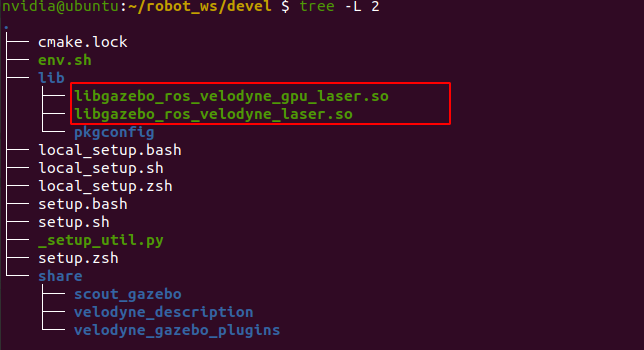
在仿真中会调用这两个库生成点云信息。
2、添加雷达支架描述文件
给激光雷达添加一个支架,把激光雷达在车上立起来,在自己的机器人包里面的urdf文件夹里面新建一个 laser_support.xacro 文件写入如下内容
Gazebo/White3、添加雷达描述文件
在机器人的base.xacro描述文件中添加激光雷达的描述
首先,包含激光雷达的支架描述文件
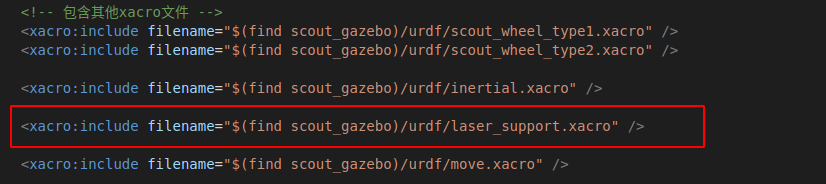
然后,添加雷达的两个属性描述变量

最后,包含激光雷达的描述文件,这里会用到上面两个属性变量

4、启动仿真
编写launch文件,启动rviz看看我们的机器人
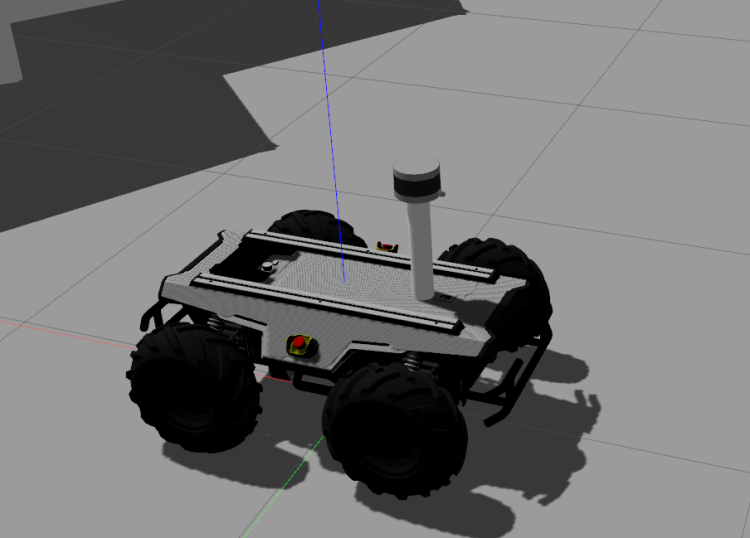
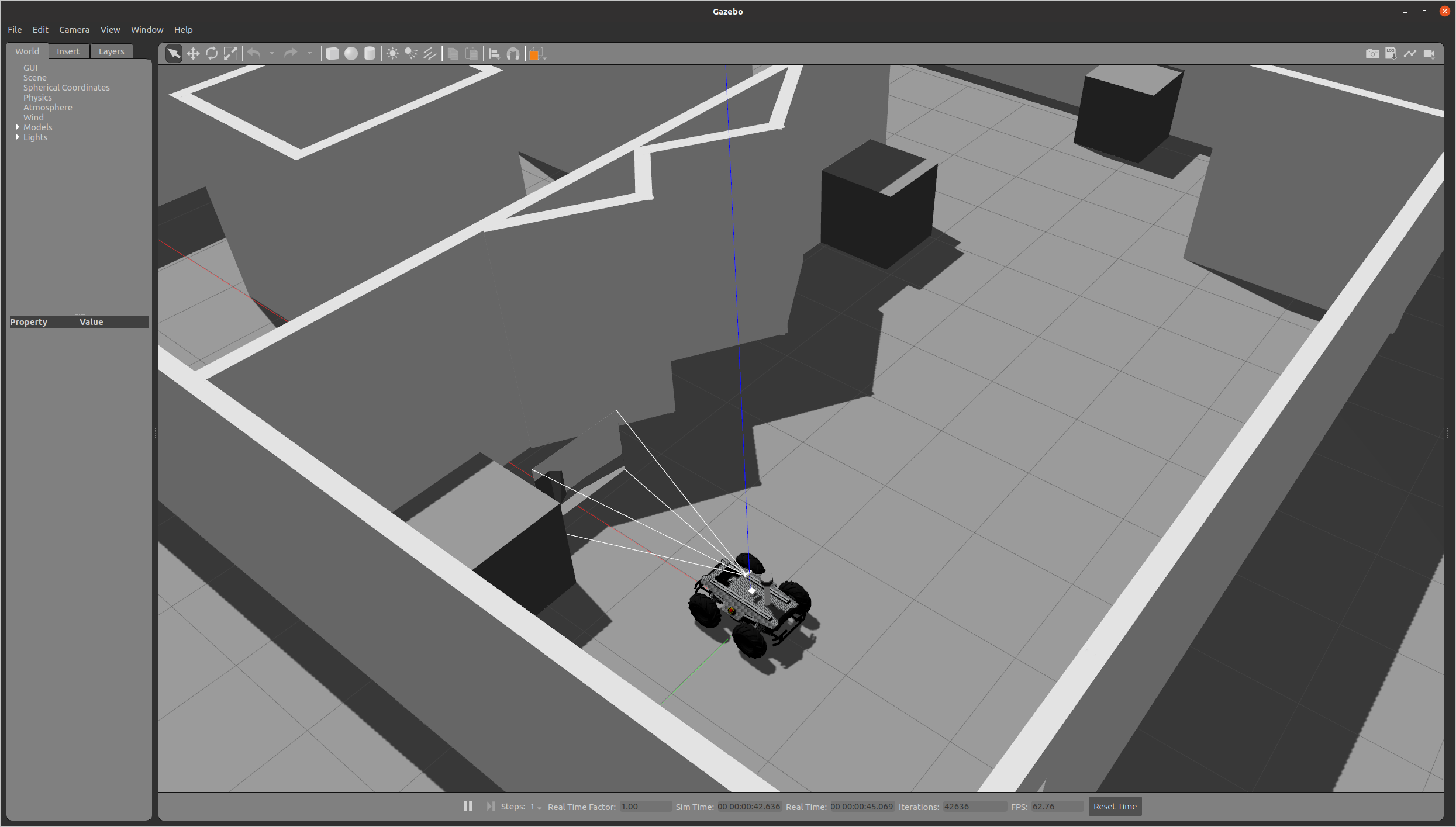
roslaunch之后就可以打开gazebo和rviz,并在里面显示我们的机器人携带着激光雷达如下:

此时可以打开我们的话题,看看是否有点云输出
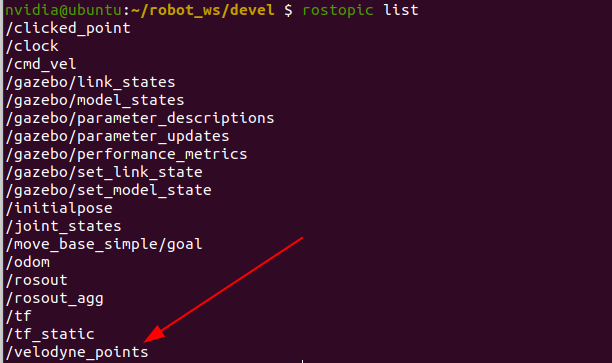
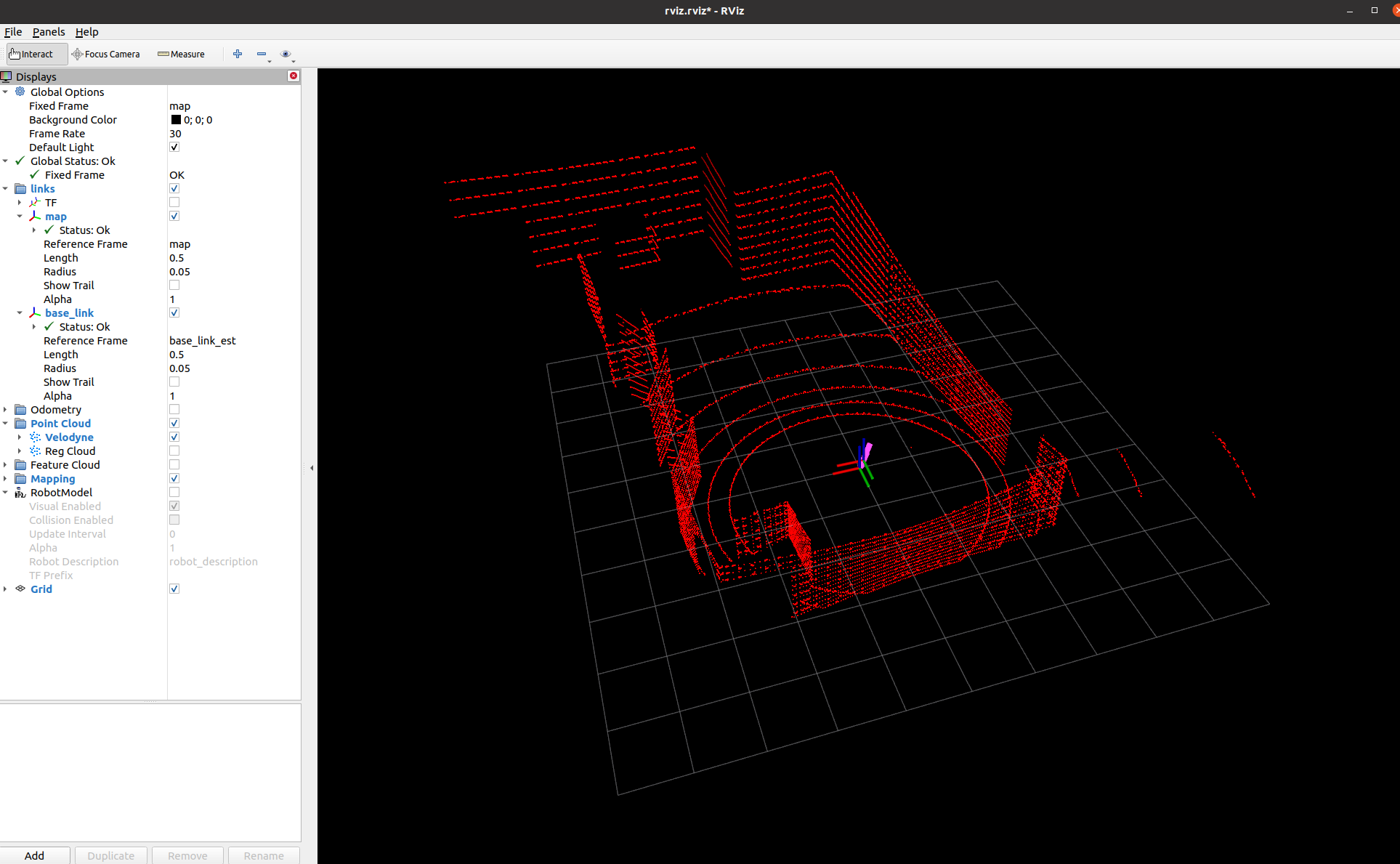
可以看到是有点云话题的,我们在rviz里面尝试把点云可视化出来看看
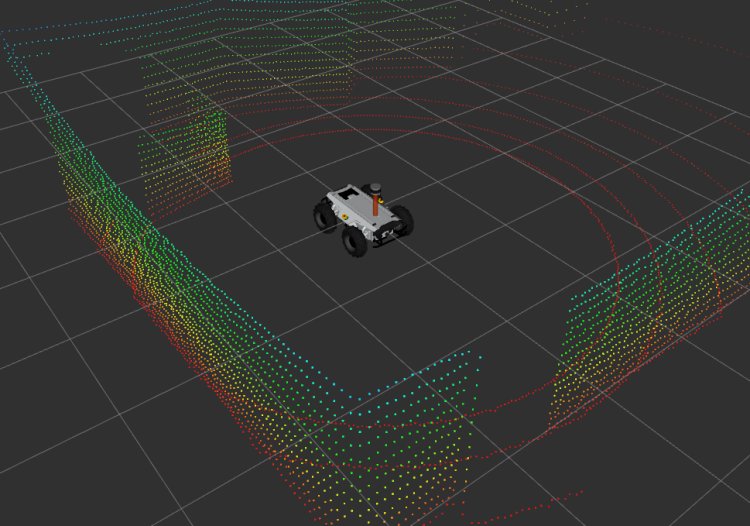
可以看到我们的点云是正常输出的。注意,我们我们为了在gazebo里面看到我们的机器人,所以没有在gazebo里面吧激光点云可视化出来,如果想要可视化可以通过修改 VLP-16.urdf.xacro 文件中这个地方
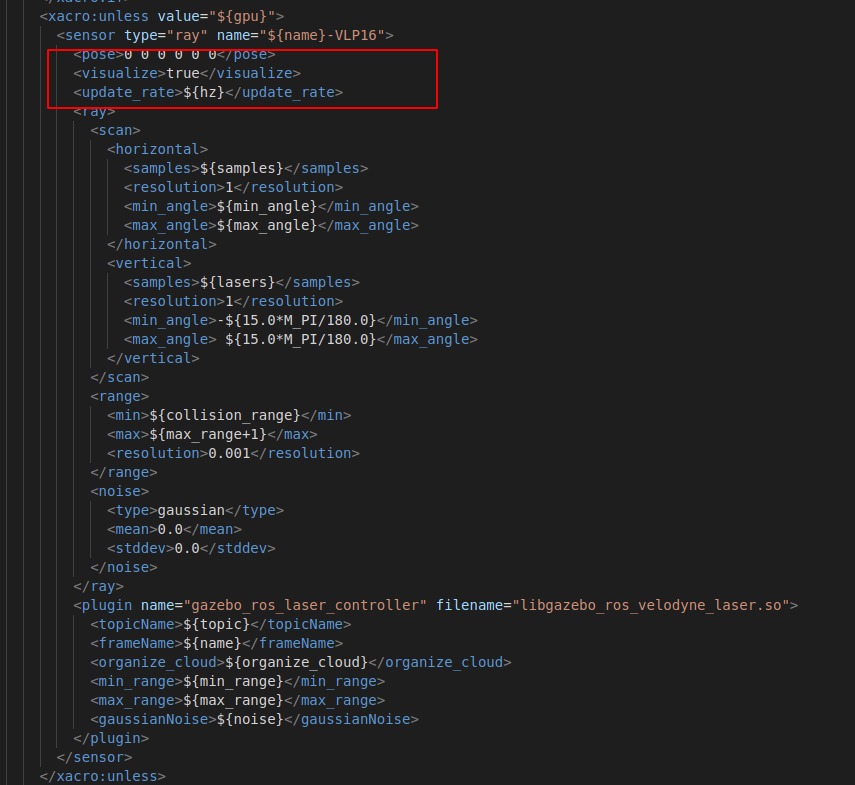
修改之后,我们就可以在gazebo里面看到激光点云了,如下:
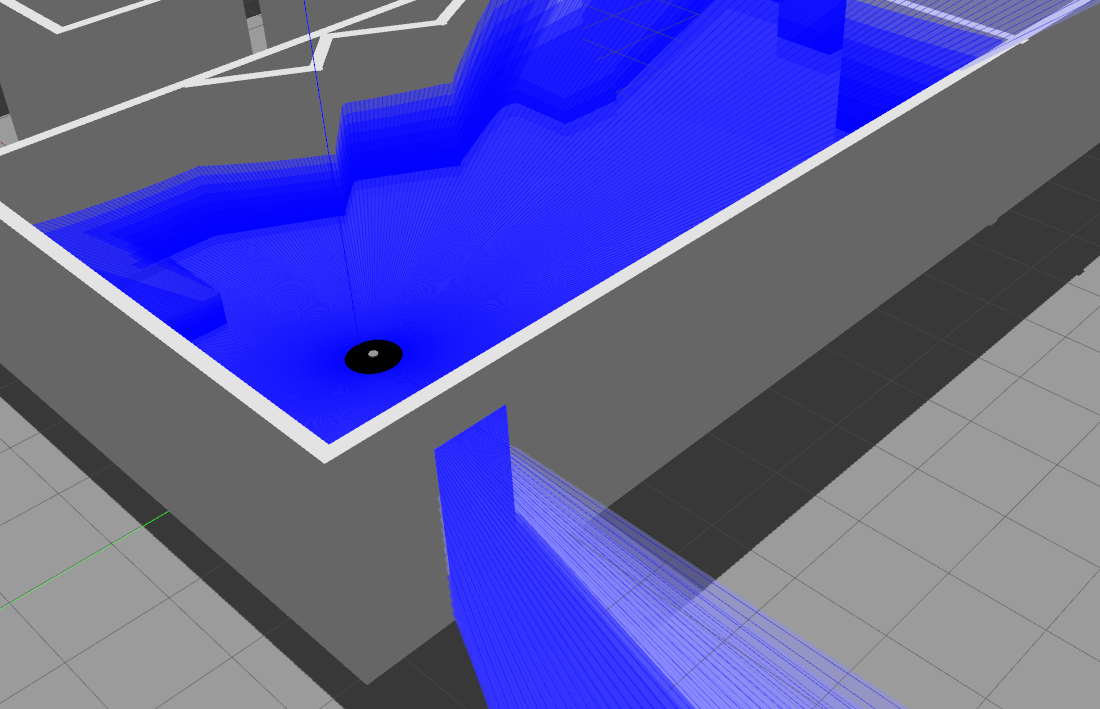
把我们的车都给盖住了,16线激光雷达的点云还是比较稠密的。现在激光雷达已经加入到仿真中了,下一步我们跑一个经典的激光SLAM框架 LIO-SAM试试看。
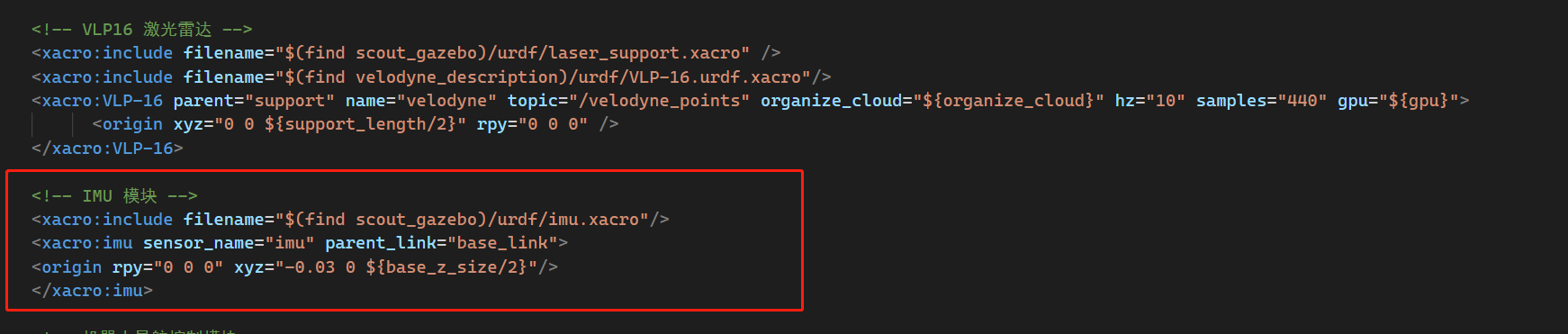
5、添加IMU模块
因为我们需要跑的框架是LIO-SAM,需要用到IMU模块,所以我们在仿真中也添加进去。同样地,我们在工程中的urdf文件夹下面再增加一个 imu.xacro文件
Gazebo/Bule true true 100 true __default_topic__ imu/data imu_base 100.0 0.01 0 0 0 0 0 0 imu_base 0 0 0 0 0 0然后在我们主描述文件 base.xacro中包含这个文件
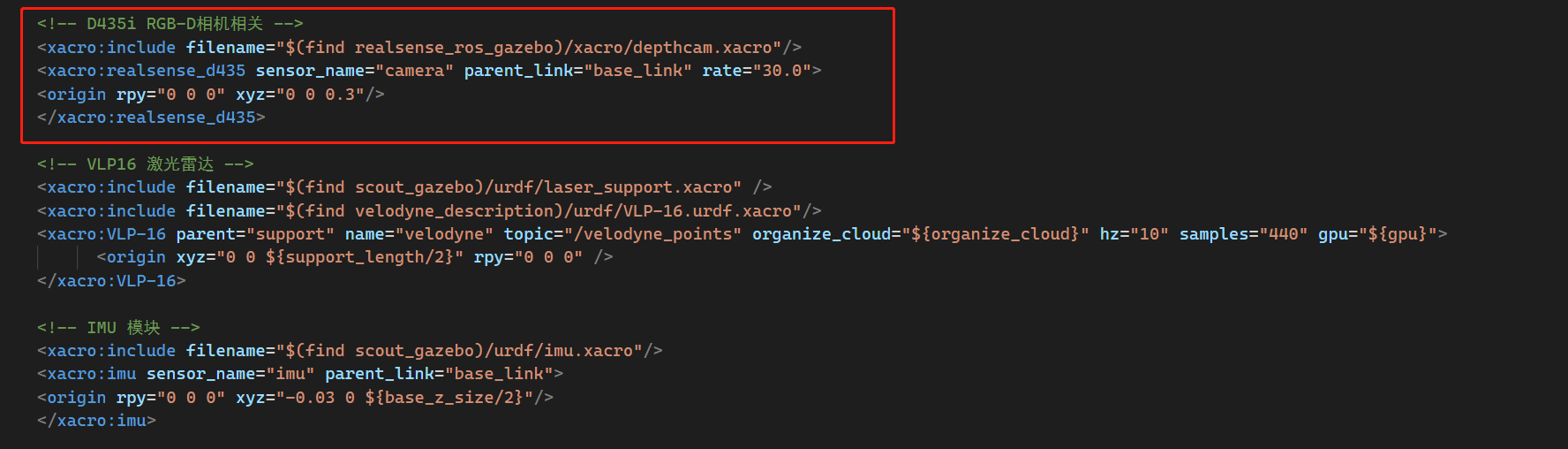
6、添加RGB-D相机
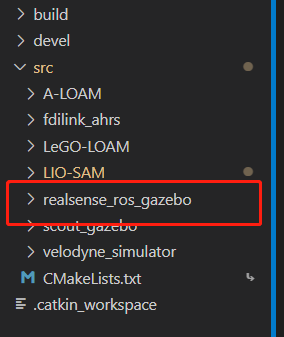
我们这里使用一个realsense系列的RGB-D相机,先去下载它的仿真SDK
$ git clone https://github.com/nilseuropa/realsense_ros_gazebo.git
这里是下载到工程的源码目录下
然后同样地,在主描述文件base.xarco中把相机也包含进去
添加完之后,我们这个仿真机器人已经配备了 IMU、RGB-D相机、16线激光雷达这些传感器,我们把环境启动起来,看看发布了多少话题
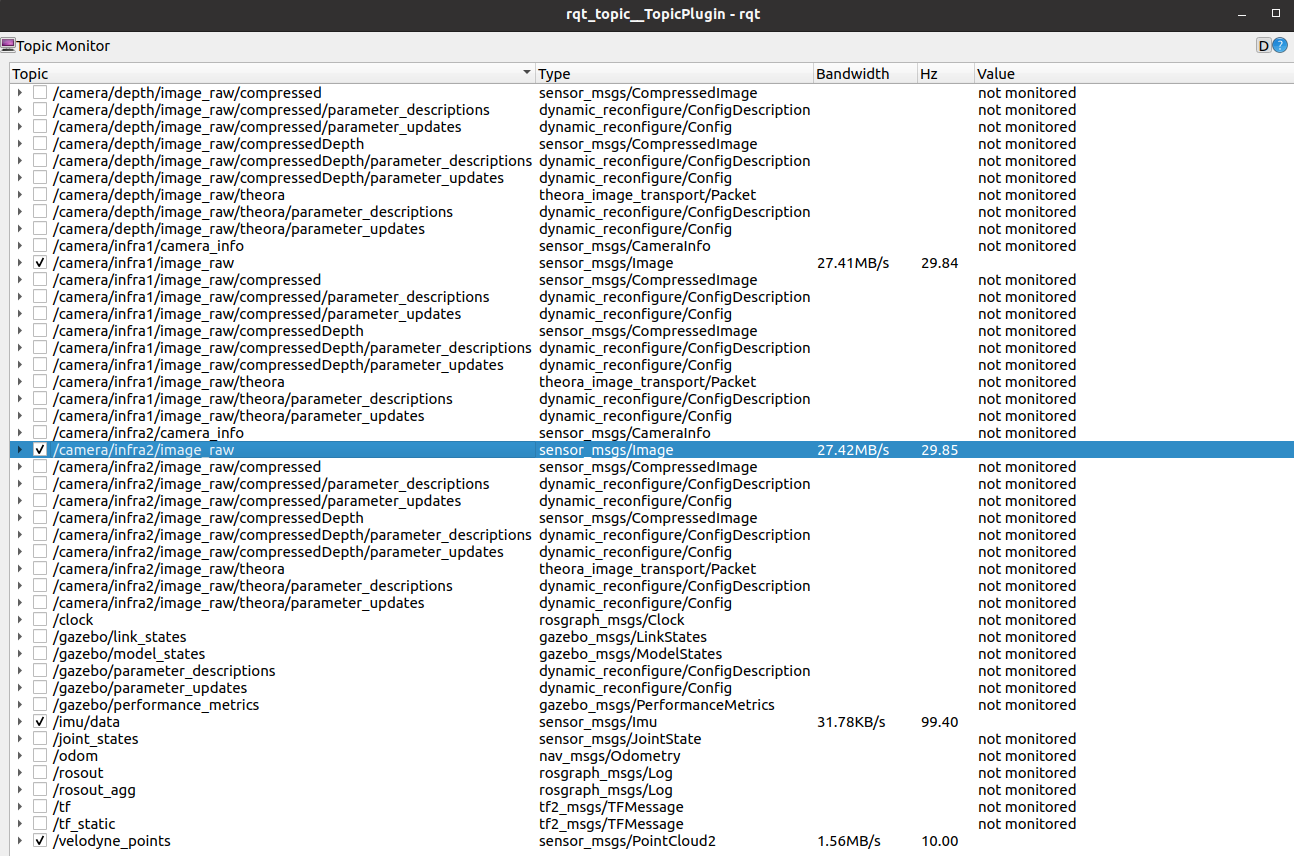
可以看到发布了很多话题,双目的、IMU的、点云的……都有,基本是机器人配置已经完成,下面准备跑一个SLAM框架试试
7、LIO-SAM仿真
安装依赖
$ sudo apt-get install -y ros-noetic-navigation $ sudo apt-get install -y ros-noetic-robot-localization $ sudo apt-get install -y ros-noetic-robot-state-publisher
安装GTSAM
$ git clone https://github.com/borglab/gtsam $ cd gtsam $ mkdir build && cd build # 注意这里要加-DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF这个选项,不然后面运行会报错 $ cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF .. $ sudo make install -j8 $ sudo ln -s /usr/local/lib/libmetis-gtsam.so /usr/lib/libmetis-gtsam.so
编译LIO-SAM
$ cd ~/robot_ws/src $ git clone https://github.com/TixiaoShan/LIO-SAM $ cd .. $ catkin_make
运行
首先启动仿真环境
$ roslaunch scout_gazebo scout_gazebo.launch
然后启动 lio-sam
$ roslaunch lio_sam run.launch
最后启动我们的控制机器人移动的节点,这个节点是ros自带的一个包,通过sudo apt install ros-noetic-teleop-twist-keyboard命令安装,这个节点主要是发布速度信息到 /cmd_val控制机器人在gazebo中进行移动,移动机器人即可进行建图
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
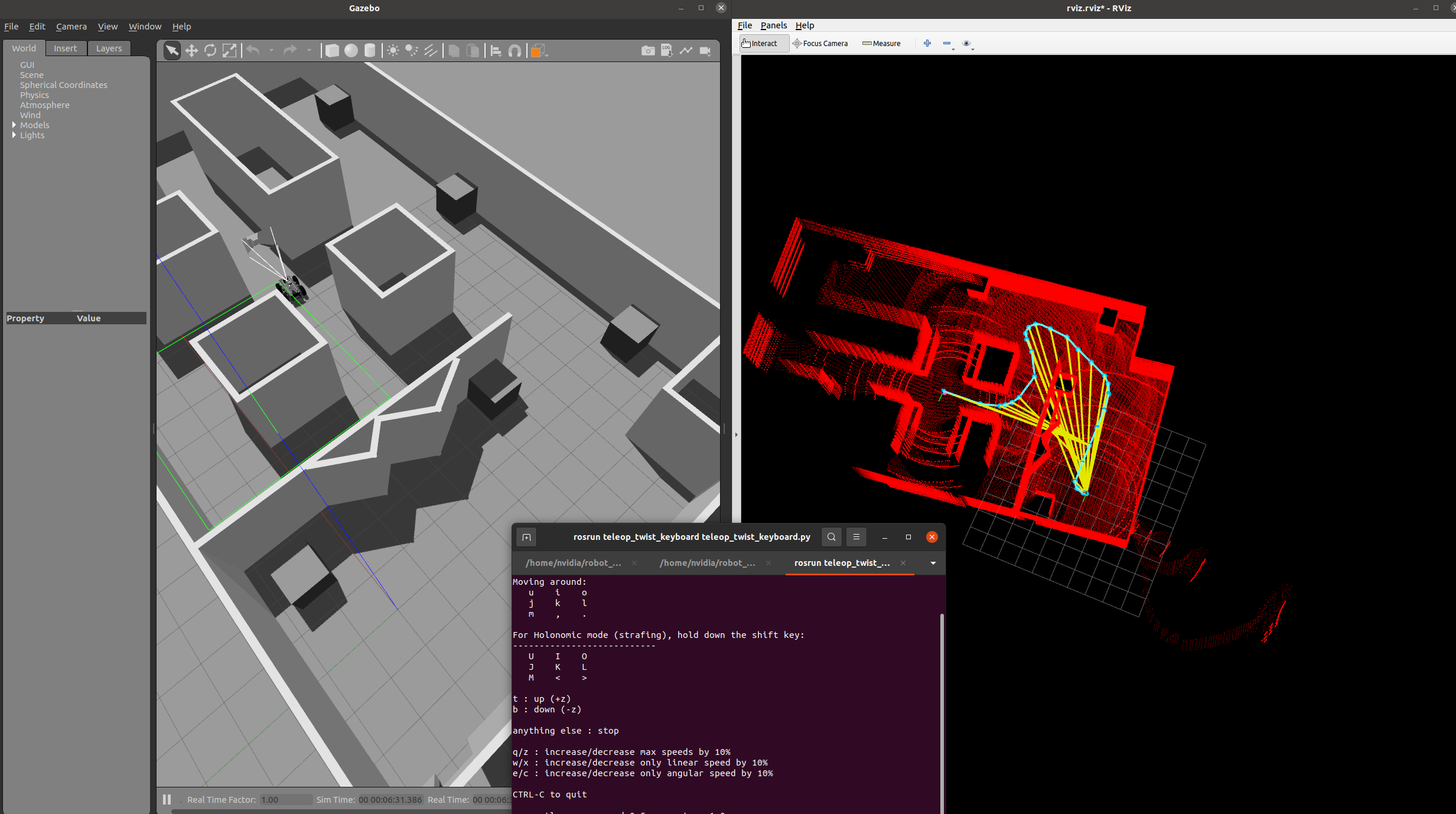
可以看到机器人在gazebo中接收我们的运动控制指令进行运动,lio-sam节点进行了位姿估计与建图。
8、源码
这里我把源码上传到我的GitHub仓库,大家可以自行下载进行实验
https://github.com/linzs-online/robot_gazebo.git
遇到的问题
1、error: ‘class std::unordered_map’ has no member named ‘serialize’
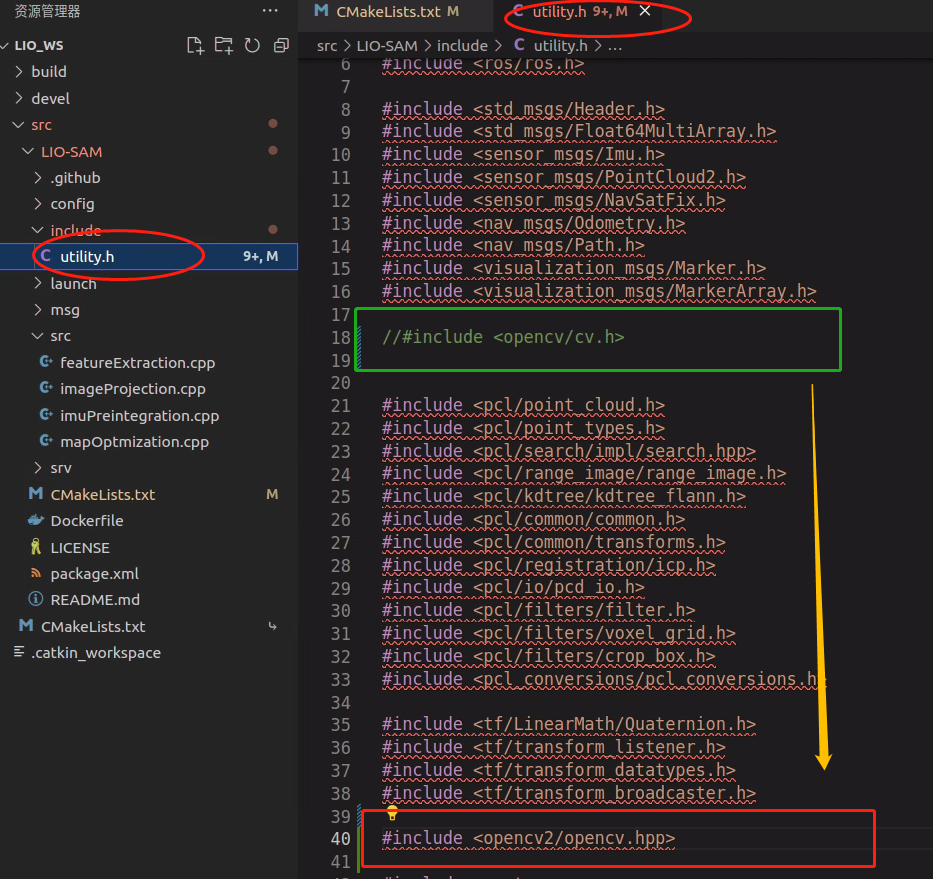
原因:PCl库依赖的flann与Opencv冲突。opencv头文件中的一些宏定义和flann库中的冲突
解决:保证pcl库中依赖的flann在opencv头文件之前先包含进去。我这里是把opencv的头文件放在PCL库之后就解决 了
2、gazebo中机器人静止,rviz中反复横跳
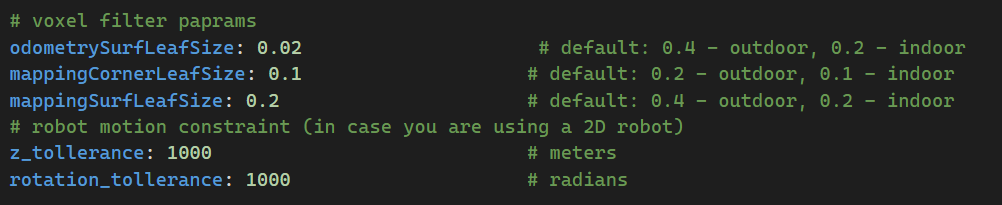
原因:lio-sam会对点云进行下采样滤波,滤波体素设置太大了,匹配过程出现误差,导致机器人优化出来的位姿反复横跳。
解决: 因为我们这里是在室内建图,所以在lio-sam的配置文件中把体素大小设置小一些
3、运行时报错 [lio_sam_mapOptmization-5] process has died [pid 260348, exit code -11
解决: gtsam编译时带上这个参数,cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF …
4、运行时报错 error while loading shared libraries: libmetis-gtsam.so: cannot open shared object file: No such file or directory
解决: sudo ln -s /usr/local/lib/libmetis-gtsam.so /usr/lib/libmetis-gtsam.so
5、运行时报 Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame
原因:机器人TF变换不正常
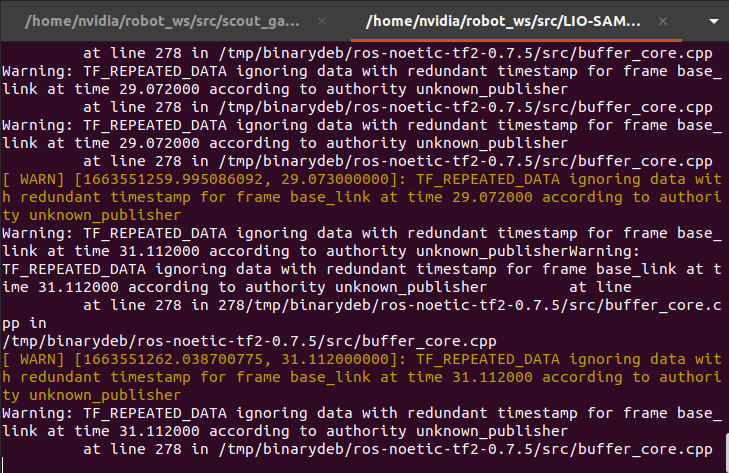
解决:通过运行 roswtf 命令分析目前环境中的TF变换,这里查到是 base_link 和odom这两个坐标之间的变换产生了冲突
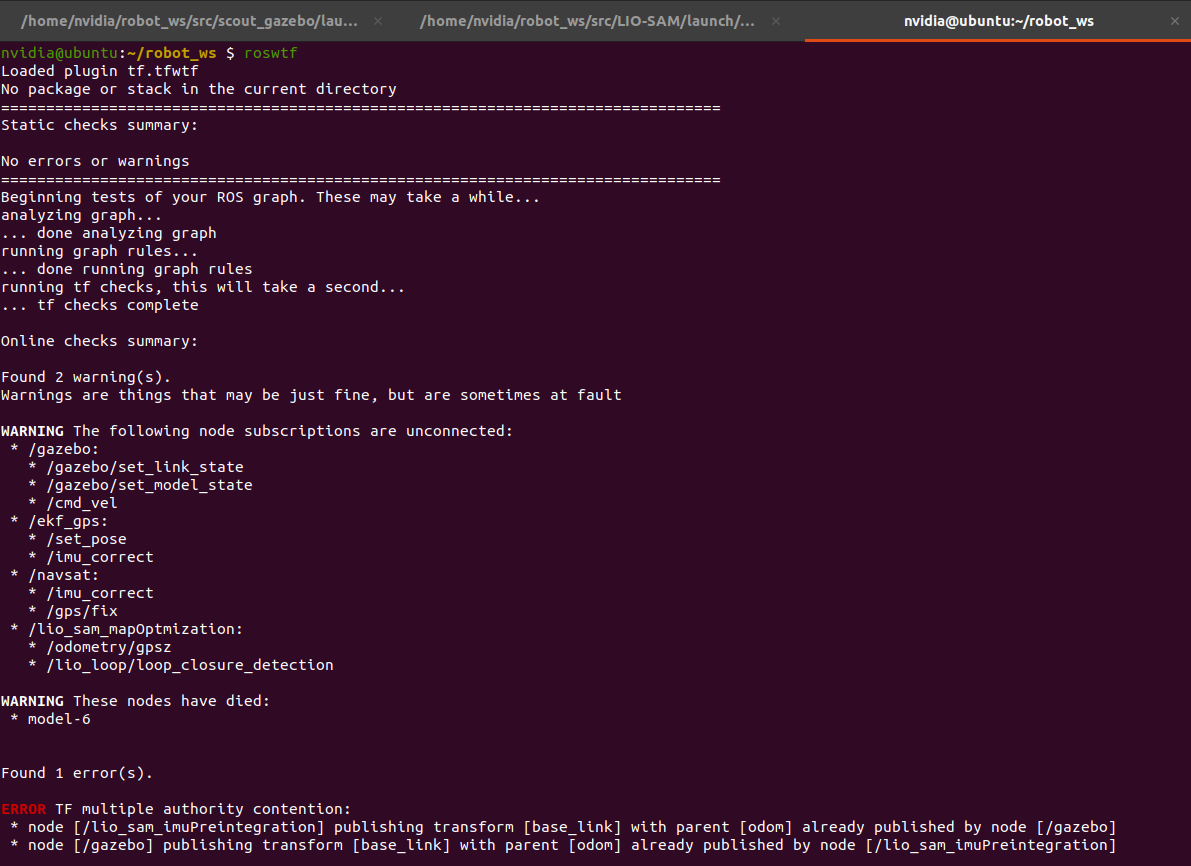
显然,是我们的gazebo仿真中的控制已经发布了 base_link 到 odom 的TF变换,但是我们的 SLAM节点又发布了一次,这两个产生了冲突,下面我们通过修改lio-sam发布的TF变换来解决这个问题,修改lio-sam的配置文件,把SLAM位姿估计结果发布的坐标换个名字即可








