【人工智能概论】 变分自编码器(Variational Auto Encoder , VAE)
文章目录
- 【人工智能概论】 变分自编码器(Variational Auto Encoder , VAE)
- 一.回顾AE
- 二.VAE简介
- 三.VAE为什么好
- 1.AE有什么不好
- 2.VAE怎么解决AE的问题
- 3.有两个困难
- 4.意想不到的问题
- 5.现在的VAE能做到什么
- 6.VAE为什么好
- 四.VAE的公式推导
- 五.重新参数技巧(reparameterization trick)
- 六.代码实现
一.回顾AE
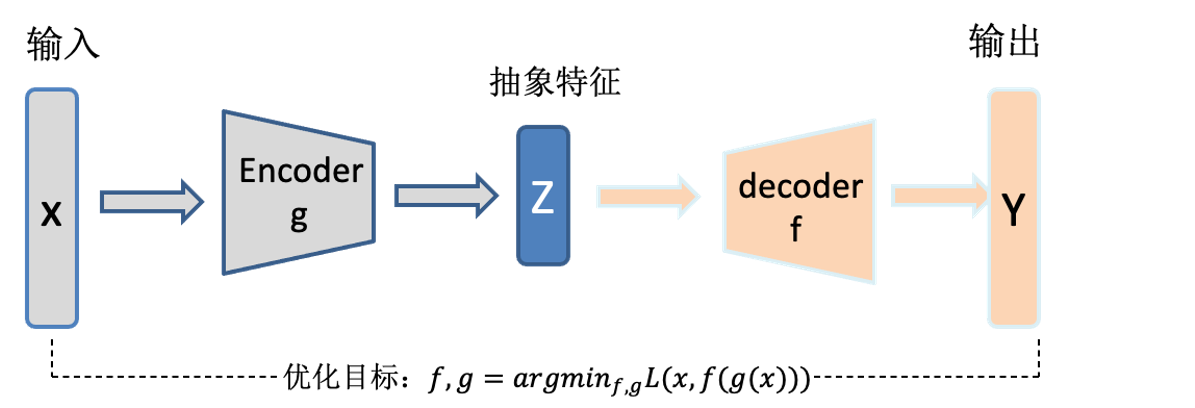
- 更多的详见自编码器简介,尤其是AE的缺点。
二.VAE简介
-
变分自编码器(variational auto-encoder,VAE),常被用于生成数据,是常见的三种生成模型之一,它可以从训练数据中来建模真实的数据分布,然后再用学习到的模型和分布去生成、构建新的数据。
-
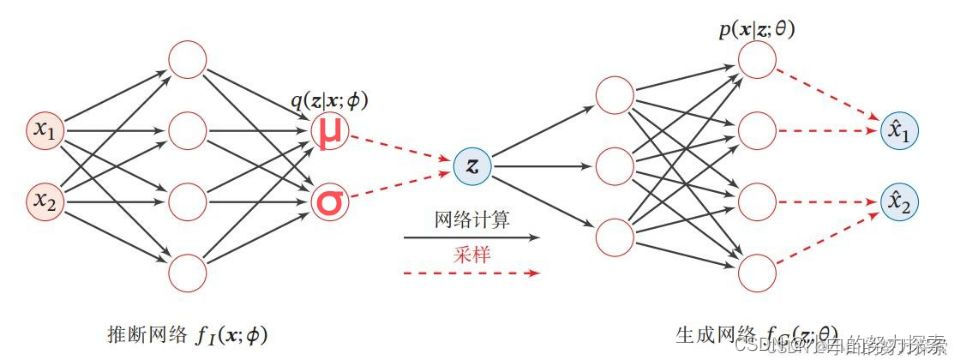
其网络结构同AE类似,但其编码器并不是直接输出一个隐变量,而是输出一个多维高斯分布的均值( u )和方差( δ ),然后在所获得的分布中进行采样,得到一个 z,将z送入到解码器中进行解码,目标同AE类似,即将利用 z还为原始的输入。
-
通过上述不难发现,VAE可以做到一个输入对应多个输出,并且这些输出之间尽可能类似,而AE的输入输出是一一对应的,因此值得注意的是VAE可以做为生成模型使用,而AE不能做生成模型,前者可以生成新的数据,而后者不能(这点在AE的缺点介绍中也有所提及)。
-
VAE网络架构
 - VAE的效果简视(无标签聚类,特征学习,过渡生成)
- VAE的效果简视(无标签聚类,特征学习,过渡生成)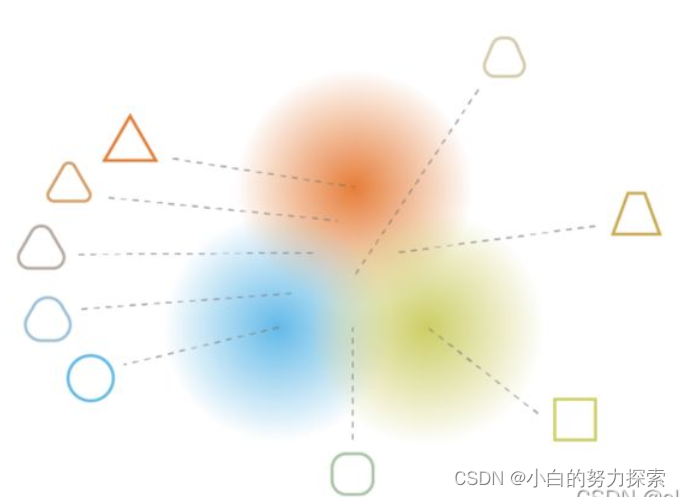
三.VAE为什么好
1.AE有什么不好
- 映射空间不连续,无规则,无界。
- 更多的详见自编码器简介
2.VAE怎么解决AE的问题
将每组数据编码为一个分布
- 不是某一个点,而是分布区域内任取一点都要尽可能被还原的像原始数据。
- 但这样有一个问题 ,不同数据对应的分布间势必会有重叠,重叠区域该怎么办,直觉告诉我们应该是让这部分数据跟谁都像点,但又不是很像。
- 确实如此,那怎么做到那?在损失函数上下功夫,算损失函数要考虑整个分布中的点,对整个分布区域内的点的损失进行加权求和,具体来说,让越靠近均值点的部分还原出来的与原始数据越像,loss越小,且这部分数据占的权重要大一些,而越靠外的还原效果越差,但是还是要有点像的,loss就要大一点,且这部分数据占的权重要小一点,总体上还是希望损失越小越好的,这样就迫使重叠区域内的点“左右逢源”使得损失处于一个相对较低的情况。
- 这样操作下来,既解决了映射空间不连续(用分布代替唯一编码),也解决了编码缺少语义的问题(重叠区域“左右逢源”),无界问题也得到缓解(数据点相对更集中)。
- 这样得到的编码理论上讲,具有语义,且存在语义过渡。
3.有两个困难
- 如何让一个输入数据对应一个分布?
- 在code上下手,可让编码器的输出为一个多维高斯分布的均值( u )和方差( δ )。
- 如何对整个分布区域内的点(无数个)进行损失值的加权求和?
- 用采样数据代替全部数据,用采样的个数代替加权(越靠近均值的取点数越多,与靠近边缘的取点数越少)。
4.意想不到的问题
- 看起来似乎已经很完美了,但实际上照着前面的思路它还会犯与AE差不多的问题,机器根本不跟你思路走,只要把方差搞的小小的,也可以满足需求嘛,这不就又变得跟AE似的了。
- 显然这不是我们所希望看到的,最好是把分布搞的“矮矮的”、“胖胖的”,重叠越多越好。
- 那怎么办那?解决方法还是在loss上下功夫,给loss下限制,让数据集所有样本对应的隐空间分布叠加起来越像高斯分布越好,根据数学所学的的知识不难知道,这样可以强迫每个组成分布变得“矮胖”。
- 另一种解释的角度
- VAE的思路是模型重构,但这个重构的过程受到噪声的影响。但是这个噪声的强度(方差)也是通过神经网络获得的,因此模型为了能够更好的重构,会尽可能让噪声为0,即方差会趋于零。
- 方差为零的话,也就没有随机性了,模型就退化成普通的AE了,噪声就不再起作用了。
- 因此VAE还让所有的P(Z | X)都向标准正态分布看齐,这样就可以防止方差为0。
- 假设所有的P(Z | X)都接近标准正态分布N(0,I),那么根据定义:

- 因此P(Z)满足标准正态分布,符合了论文的先验假设,然后我们在生成数据的时候就可以在标准正态分布下采样了,这就保证了VAE有生成的能力。
- 为什么是正态分布?对于P(Z | X)和P(Z)的分布 为什么选择正态分布?均匀分布不可以吗?
- 首先这是个实验问题,两种分布都试试嘛。其次直觉上讲确实是正态分布更靠谱,正态分布能在均值不变的情况下,改变方差
5.现在的VAE能做到什么
- 通过以上操作达到了什么境界
- 隐空间有规律可循,长得像的数据会离的更近。
- 隐空间随便取一个点,生成的东西多少都有点意义,这是因为除了分布的均值会被算loss,边缘部分也会被考虑。
- 正是因为附近的点也会被抓包,所以相似含义的数据一定会离得相对较近,但又不会太近,因为中心区域被多次采样,所以势必会特色鲜明,不可能与别的类离得太近。
- 正是这种相似数据离得近,但又不成簇,也不会离得太远,使得VAE有做分类器的潜质。
- code有规律,有含义,有区分,有过渡,完全可以用于生成。
- 至于压缩编码,完全可以用均值当编码。
- 方差是为了算loss,划定分布用的。
6.VAE为什么好
- 总之,就是VAE利用巧妙的结构和损失函数,对网络实现了约束,解决了AE的缺点,使AE的应用潜能真正能够实现。
- 此外,VAE也可以应对GAN的三大缺点(训练不稳定,难以逆向,不提供密度估计)
四.VAE的公式推导
-
从上面的介绍不难发现,VAE的重点是对损失函数的构建,但先别急,先从建模z的分布开始下手。
-
隐变量Z与X是紧密相关的,不妨设Z ~ P(Z | X)
-
但数据集X的数据是有限的,因此P(Z | X)是未知的,只能基于现有的数据,通过编码器近似一个分布,Z ~ Q(Z | X)。
-
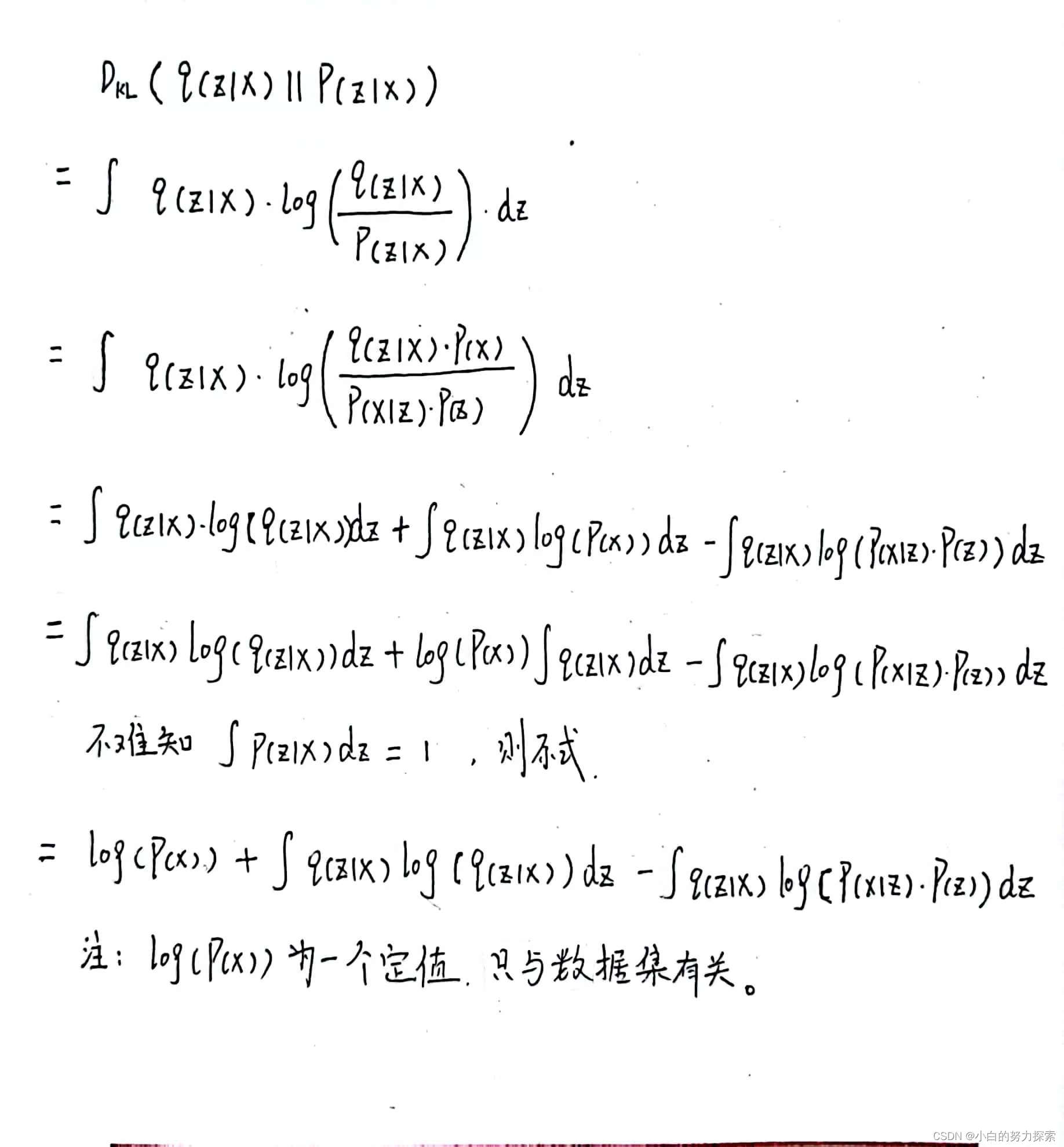
我们希望它俩尽可能相似,因此引入KL散度来衡量相似度,进而优化问题就变成了最小化KL散度。
-
因此优化问题就变成了对下式求最小化

- 做个正负变换,将优化问题转换为最大化下式问题。
- 第一项是不断的从样本集X确定的分布Z中采样一个z,希望z重建的输入x期望最大。
- 因此P( X | Z )是解码器,记为P(X | Z ; θ),可以理解第一项为是对解码器的束缚。
- 而一般期望不好直接求,所以可以用其他的代替,比如说分类(离散)问题就用交叉熵,生成(连续)问题就用MSE。
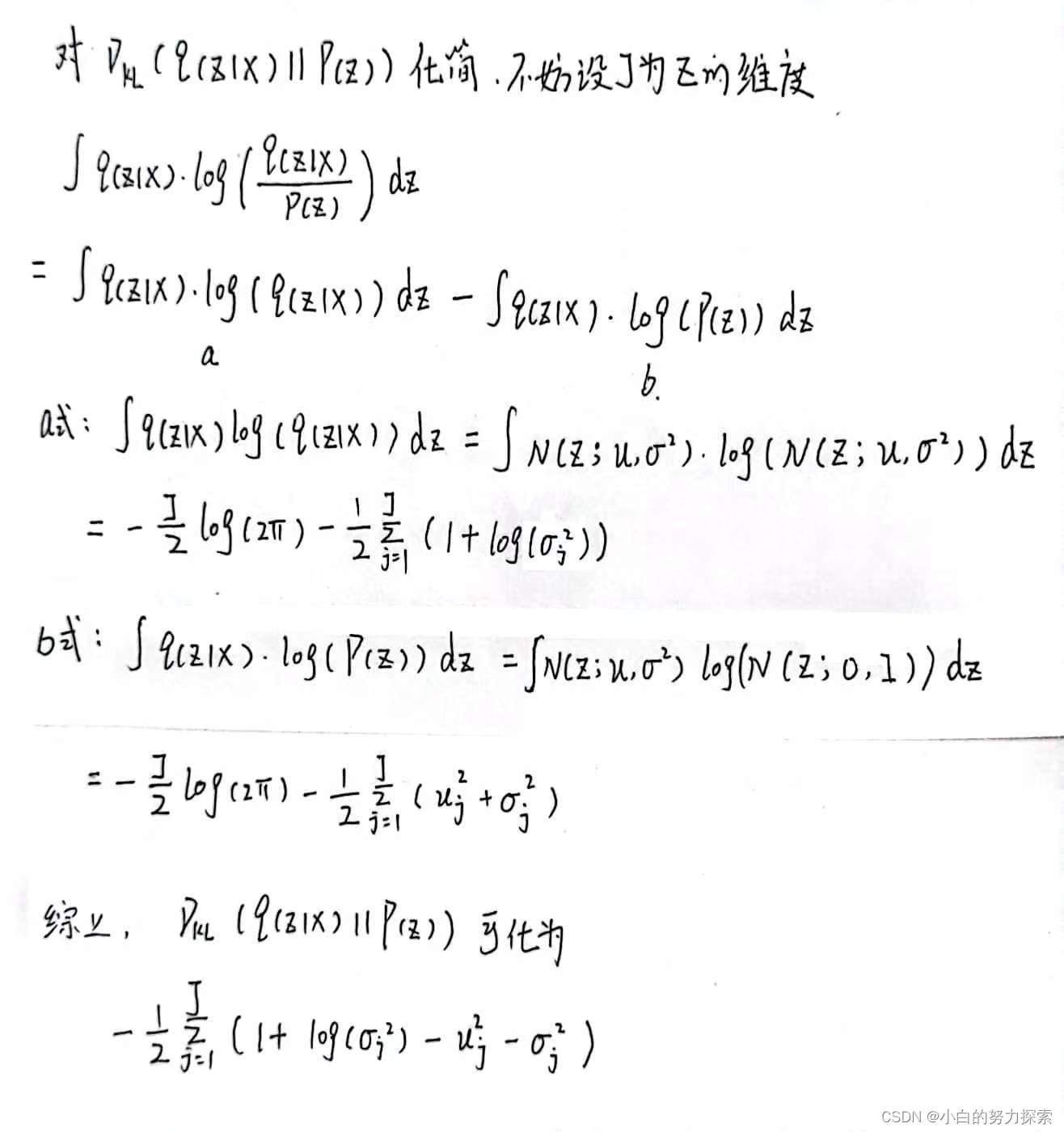
- 第二项是由X近似的Z的分布Q(Z | X)(一般符合高斯分布)与真实的Z的分布P(Z)的相似程度,与P(Z | X)一样P(Z)是未知的(论文中假设它是标准正态分布)。
- Q(Z | X)是编码器,记为Q(Z | X ;φ),可以视第二项为对编码器的约束。
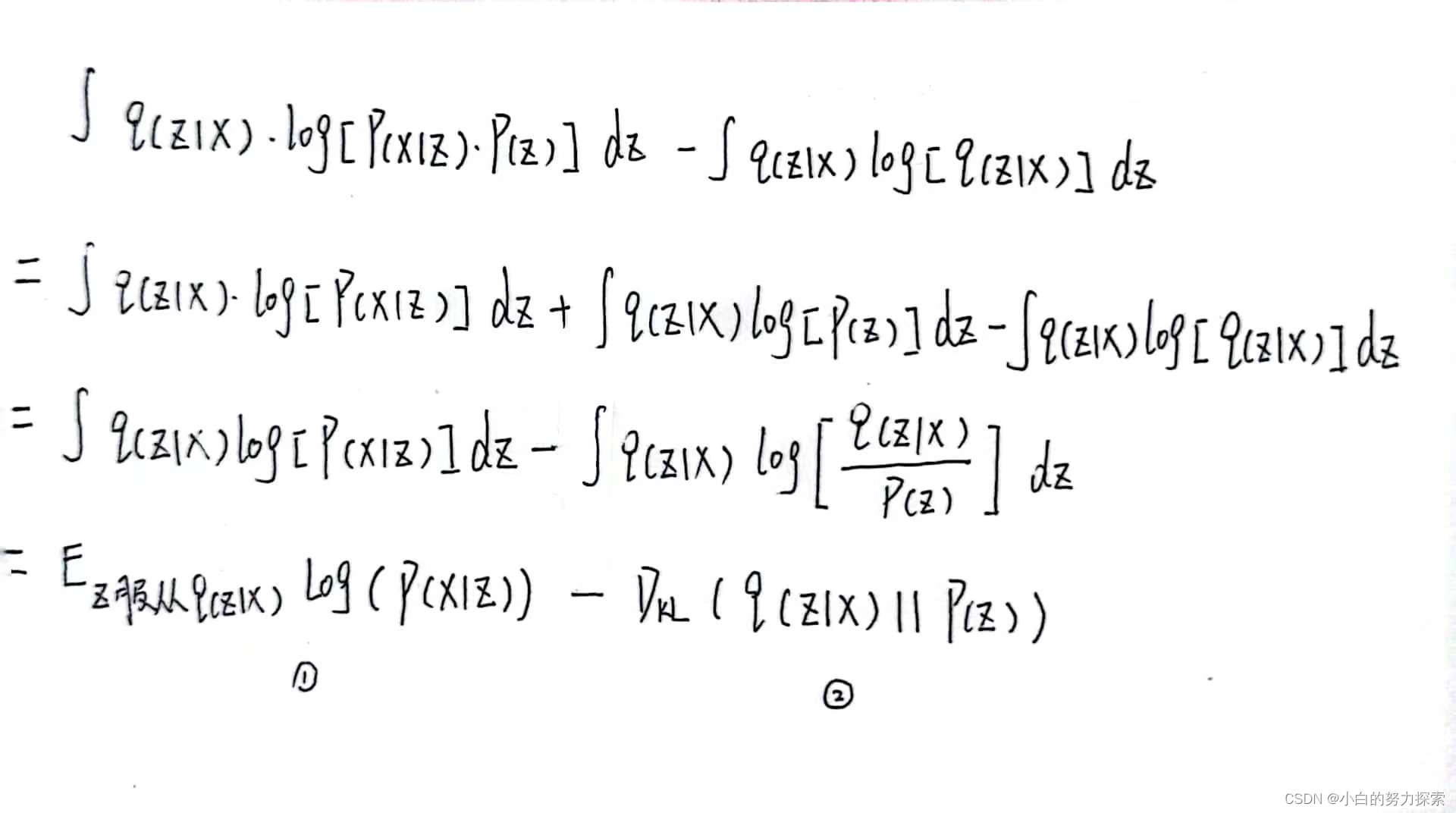
- 对第二项的化简,如下图。
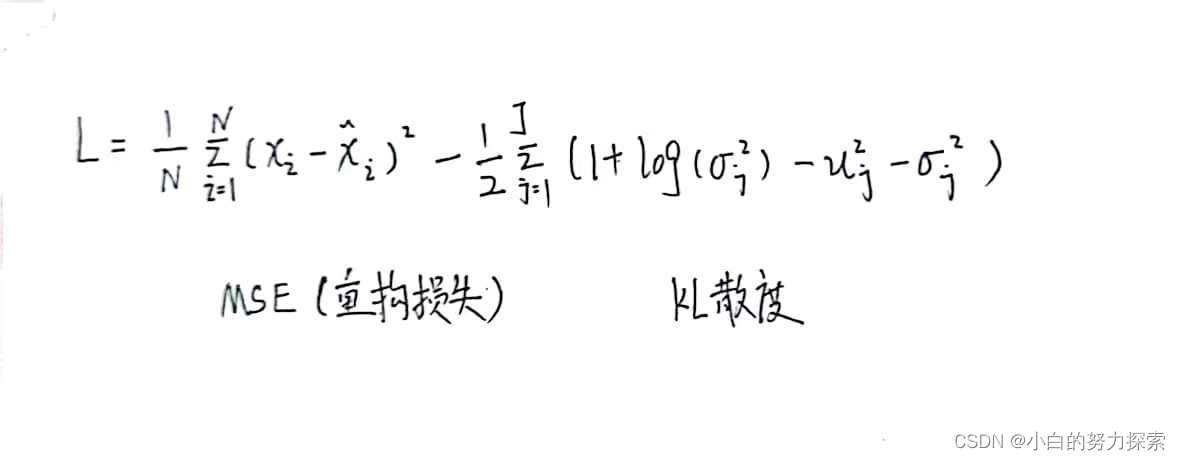
- 综上所述,不难得到,当VAE用于数据(图像)生成时的损失函数为
- 尽管我们通过公式推导出损失函数应该是上面的形式,但是有没有可能只这两部分中的一个也是可以的?答案是不行的,详见下图。
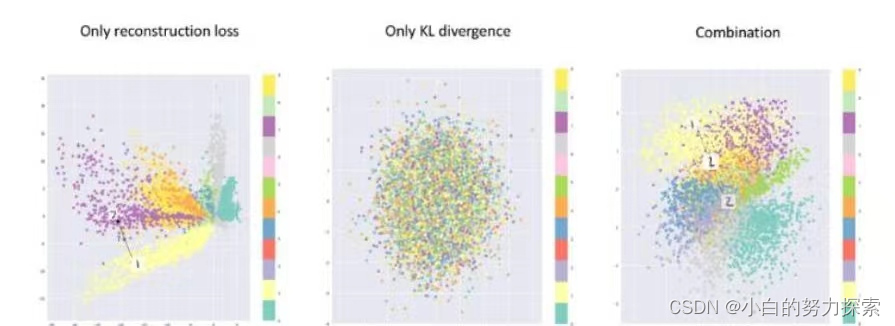
- 由上图不难发现
- 如果只用重构函数,就会得到和AE类似的结果,这正对应了我们3.4说的那种问题。
- 如果只用KL散度的话,那么每个类别的数据对应的分布会更倾向于标准正态分布,彼此混叠,缺乏语义。
- 只有两者兼顾,才能达到我们的设计预期。
- 因此损失函数的两个部分缺一不可。
- 总之,重构的过程是希望Z是没有噪声的,而KL损失是希望有高斯噪声的,两者对立。与GAN类似有一种对抗的意味在里面,通过对抗找到一个平衡,实现共同进化。
五.重新参数技巧(reparameterization trick)
- P( Z | X )的分布是正态分布,每次在分布中随机采样一个点,然而“采样”操作是不能反向传播的,因此引入重新参数化技巧。
- 重新参数化技巧的底层逻辑是:“采样操作”是不能求导的,但是“采样结果”是可以求导的。

- 这样就把从N(μ,σ)里采样变成了从N(0,I)里采样,然后通过参数变换得到从N(μ,σ)里采样的结果。
- 因为从N(0,I)里采样的过程,独立于网络之外,因此“采样操作”就不用参与到剃度下降的运算中了,取而代之的是将“采样结果”参与到计算中,这就使得整个模型可训练了。
六.代码实现
""" VAE网络架构与损失函数的实现 """ import torch from torch import nn import torch.nn.functional as F class VAE(nn.Module): def __init__(self): super(VAE, self).__init__() # 编码器所用的结构 self.fc1 = nn.Linear(784, 200) self.fc2_mu = nn.Linear(200, 10) # 用于生成高斯分布的均值 self.fc2_log_std = nn.Linear(200, 10) # 用于生成高斯分布的方差,且为方便计算默认方差是经过log函数处理的。 # 解码器所用的结构 self.fc3 = nn.Linear(10, 200) self.fc4 = nn.Linear(200, 784) def encoder(self, x): h1 = F.relu(self.fc1(x)) mu = self.fc2_mu(h1) # 生成均值 log_std = self.fc2_log_std(h1) # 生成经过log处理的方差 return mu, log_std def decoder(self, z): h3 = F.relu(self.fc3(z)) recon = torch.sigmoid(self.fc4(h3)) # 之所以用sigmoid是因为本例用到的图像默认像素值为0-1之间。 return recon def reparametrize(self, mu, log_std): std = torch.exp(log_std) # 因为生成的方差是经过log处理的,所以真正要用到方差的时候要再把它经过exp处理一下。 eps = torch.randn_like(std) # 在标准正态分布中采样 z = mu + eps * std # 获得抽取的z return z def forward(self, x): mu, log_std = self.encoder(x) z = self.reparametrize(mu, log_std) recon = self.decode(z) return recon, mu, log_std # 返回重构的图,均值,log后的方差 def loss_function(self, recon, x, mu, log_std) -> torch.Tensor: # 定义损失函数 ,注:-> torch.Tensor似乎没啥用,见test.py recon_loss = F.mse_loss(recon, x, reduction="sum") # use "mean" may have a bad effect on gradients kl_loss = -0.5 * (1 + 2*log_std - mu.pow(2) - torch.exp(2*log_std)) kl_loss = torch.sum(kl_loss) loss = recon_loss + kl_loss return loss"""VAE简单应用举例""" import torch from torch import optim from torch.autograd import Variable from torch.utils.data import DataLoader from torchvision import transforms from torchvision.utils import save_image from torchvision.datasets import MNIST import os import datetime from vae import VAE if not os.path.exists('./vae_img'): os.mkdir('./vae_img') def to_img(x): x = x.clamp(0, 1) # torch.clamp(input,min,max) 把输入的张量加紧到指定区间内 x = x.view(x.size(0), 1, 28, 28) # batch,channel,w,h return x num_epochs = 100 batch_size = 128 img_transform = transforms.Compose([ transforms.ToTensor() # transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5)) ]) dataset = MNIST('./data', transform = img_transform, download=True) datalodader = DataLoader(dataset, batch_size=batch_size,shuffle=True) start_time = datetime.datetime.now() model = VAE() if torch.cuda.is_available(): print('cuda is ok!') model = model.to('cuda') else: print('cuda is no!') loss_function = VAE.loss_function optimizer = optim.Adam(model.parameters(),lr=1e-3) for epoch in range(num_epochs): model.train() train_loss = 0 for batch_idx, data in enumerate(datalodader): img, _ = data img = img.view(img.size(0), -1) # 把图像拉平 img = Variable(img) # tensor不能求导,variable能(其包含三个参数,data:存tensor数据,grad:保留data的梯度,grad_fn:指向function对象,用于反向传播的梯度计算)但我印象中好像tensor可以求梯度 见13讲 img = (img.cuda() if torch.cuda.is_available() else img) optimizer.zero_grad() recon_batch, mu, log_std = model(img) loss =loss_function(recon_batch, img, mu, log_std) loss.backward() train_loss += loss.item() optimizer.step() if batch_idx % 100 == 0: end_time = datetime.datetime.now() print('Train Epoch: {} [{}/{}({:.0f}%] Loss:{:.6f} time:{:.2f}s'.format( epoch, batch_idx * len(img),len(datalodader.dataset), loss.item()/len(img), (end_time-start_time).seconds )) print('====> Epoch: {} Average loss: {:.4f}'.format( epoch, train_loss/len(datalodader.dataset) )) if epoch % 10 == 0: # 生成图像 if torch.cuda.is_available(): device = 'cuda' else: device = 'cpu' z = torch.randn(batch_size, 20).to(device) out = model.decoder(z).view(-1,1,28,28) save_image(out, '.vae_image/sample-{}.png'.format(epoch)) # 重构图像 save = to_img(recon_batch.cpu().data) save_image=(save, './vae_img/image_{}.png'.format(epoch)) torch.save(model.state_dict(),'./vae.pth')
- 尽管我们通过公式推导出损失函数应该是上面的形式,但是有没有可能只这两部分中的一个也是可以的?答案是不行的,详见下图。
- 综上所述,不难得到,当VAE用于数据(图像)生成时的损失函数为
- 做个正负变换,将优化问题转换为最大化下式问题。
-
- 通过以上操作达到了什么境界
-
- 更多的详见自编码器简介,尤其是AE的缺点。